Rasenkabel-Finder
Aus Faulheit, Samstags den Rasenmäher zu schieben und natürlich aus Technikbegeisterung, haben wir uns einen Mähroboter angeschafft. Wir legen zwar keinen Wert auf einen Rasen in Golfplatzqualität, aber die Unkräuter sollten auch nicht überhand nehmen. Da wir kein Gift auf den Rasen sprühen wollen, haben wir uns für einen Vertikutierter entschieden, der den Boden etwas auflockert und es den Unkräutern etwas schwerer macht. Natürlich sollte man auch mit dem Einsatz des Vertikutierers sparsam umgehen, weil der ja auch jede Menge Mikroorganismen und Insekten ausgräbt.Das Problem
Unser Mähroboter braucht - so wie fast alle dieser Roboter - ein Kabel im Rasen, an dem der Bursche den Rand des Rasens erkennt. Bei unserem Typ (Landroid von Worx) hangelt sich der Mäher an diesem Kabel auch zurück zur Ladestation.Prinzipbedingt muss man das Kabel etwa 20cm vom Rasenrand entfernt in den Rasen legen. Es liegt einfach auf der Erdoberfläche und wird so natürlich zur perfekten Beute des Vertikutierers.
Nachdem wir das Kabel einmal durchgehäckselt hatten und einige Zeit brauchten, um die Trennstelle zu finden, musste also eine technische Lösung her.
Das Prinzip des Rasenkabels

Das Bild zeigt den Rasen mit Kabel im Schnitt. Das Kabel wird von einem Strom durchflossen und so entsteht ein Magnetfeld, dass auf der ganzen Wiese nachweisbar ist. Außerhalb der Wiese verläuft es in entgegengesetzter Richtung. Bringt man einen Magnetfeldsensor an die Stellen 1 und 2 im Bild, dann kann man an der Richtung des Feldes erkennen, ob man sich innerhalb oder außerhalb des Kabelrings befindet.
Man könnte das mit einem Hall-Sensor machen.
Da es aber immer sehr schwer ist, eine statische Messgröße von anderen Signalen zu unterscheiden (z.B. Erdmagnetfeld), haben sich die Entwickler der Mähroboter für gepulsten Strom entschieden.
Da es keine Dokumentation zu dem genauen Prinzip zu finden gab, habe ich mit dem Oszilloskop gemessen, was im Kabel passiert:

Mit dem Bitscope und einer einfachen Draftspule sieht man die induzierte Spannung.

Hier sieht man die Spannungspulse, die die Basisstation des Mähroboters erzeugt, die Stromimpulse im Kabel und damit Magnetfeldimpulse auf dem ganzen Rasen verursacht.

Hier sieht man die induzierte Spannung in der Spule, wenn sie außerhalb der Rasenkabelschleife liegt. Ein positiver Spannungspuls direkt gefolgt von einem negativen.

Hier das Bild, für den Fall, in dem die Spule innerhalb der Rasenkabelschleife liegt: Zuerst kommt der negative und dann der positive Impuls.
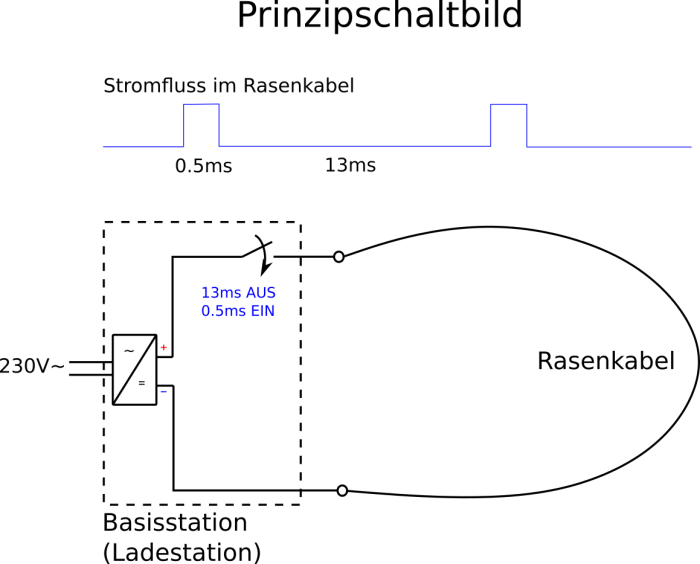
Das Prinzipschaltbild zeigt, wie die Gesamtanordnung funktioniert. Die Basisstation erzeugt Stromimpulse im Kabel, deren Einschaltdauer wesentlich kürzer ist als die Ausschaltdauer. Würde man ein 50% Tastverhältnis zwischen Strom-An und Strom-Aus verwenden, so könnte man nicht unterscheiden, ob der positive oder der negative Puls zuerst kommt.
Induktion
Bringt man eine Spule in das, sich verändernde Magnetfeld, dann wird proportional zur Geschwindigkeit der Veränderung eine Spannung in der Spule erzeugt. Je mehr Windungen und je größer die Fläche der Spule, desto größer die Spannung. Zu groß darf die Fläche nicht werden, da sonst die Ortsauflösung zu ungenau wird. Wir sehen dann nicht genau die Position des Rasenkabels.Da sich hier das Magnetfeld sehr schnell ändert - es wir ja plötzlich ein- und ausgeschaltet - entstehen Spannungsspitzen in der Spule.
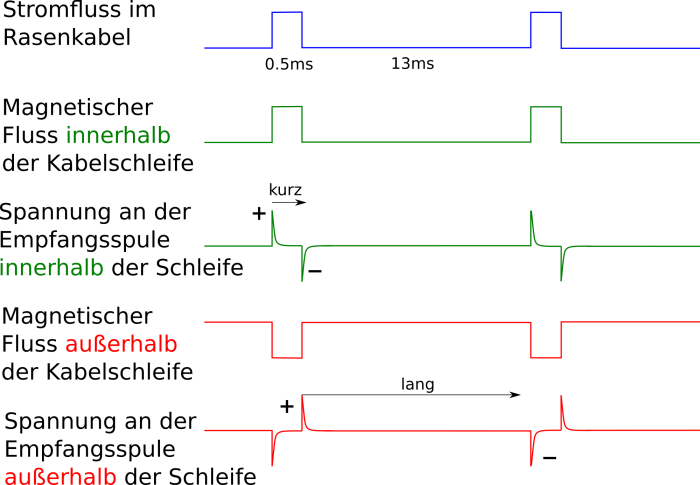
Der Abstand zwischen positivem und negativem Spannungspuls dient dann zur Erkennung der Position der Spule relativ zum Rasenkabel.
Keine gute Idee
Am einfachsten erschien mir die Verwendung eines ausgedienten Relais. Das hat ja jede Menge Windungen.
Aber es hat auch einen Spulenkern. Der wird magentisiert und muss wieder entmagnetisiert werden. Was bei der Drahtspule ohne Kern so klare Spannungsimpulse erzeugt hat, sieht jetzt mit dem Relais ziemlich verzerrt aus. Ein zuverlässige Detektion der Pulse ist so nicht möglich.
Also Luftspule selber wickeln...
Rasenkabel-Simulator
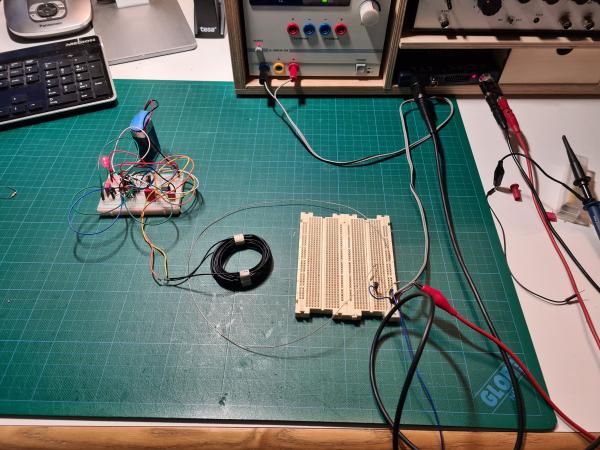
Da ich keine Lust hatte meinen Labortisch auf den Rasen zu verlagern, musste ich das Rasenkabel unter "Laborbedingungen" nachbauen
Hierzu habe ich eine Drahtschleife an den AWG Ausgang meines Picoscope MSO angeschlossen. Damit lässt sich eine Pulsfolge erzeugen, die dem des Rasenkabels nahekommt. Ich habe 0.5ms ein und 10ms aus eingestellt.
Verstärken und einrasten
Das folgende Bild zeigt die Schaltung. Man braucht dazu keine extrem schnellen OpAmps aber zu langsam (wie LM741 oder LM324) sollten sie nicht sein. Ich habe TL074 verwendet - 4 OpAmps in einem Gehäuse.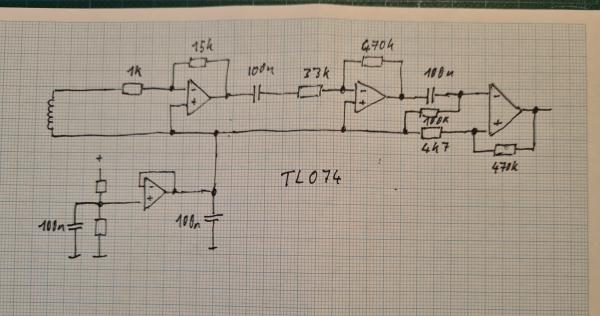
Die ersten beiden Verstäkerstufen verstärken einfach nur das Signal. Damit auch bei einem großen Rasen in der Mitte noch genug Signal ankommt.
Über die Kondensatoren sind sie DC entkoppelt, damit sich keine Offsetprobleme einstellen.
Der dritte Verstärker ist ein Komparator. Allerdings mit einer positiven Rückkopplung. Die sorgt dafür, dass das Vergleichslevel beim Strompuls nach oben, unter die Nulllinie gezogen wird. Dadurch bleibt der Komparator geschaltet, auch wenn der Spannungsimpuls wieder auf Null zurückgeht. Erst ein deutlicher Impuls nach unten schaltet den Komparator um. So "merkt" sich die Schaltung des letzten Impulses, bis der nächste kommt.
Kompakter-Aufbau
Ich habe mit dem 3D-Drucker einen Spulenkörper gedruckt, der 100 Windungen 0.2mm Kupferlackdraht aufnimmt. Das Ganze passt dann in ein passendes kleines Gehäuse - ebenfalls aus dem 3D-Drucker.
Den Spulenkern habe ich mit Sekundenkleber auf die Platine geklebt.
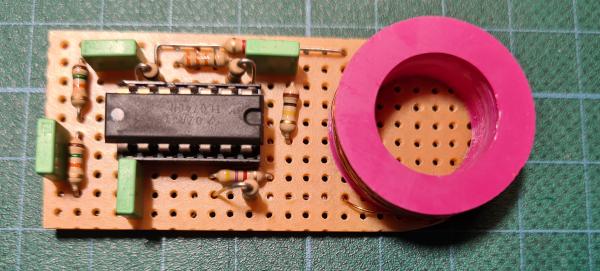
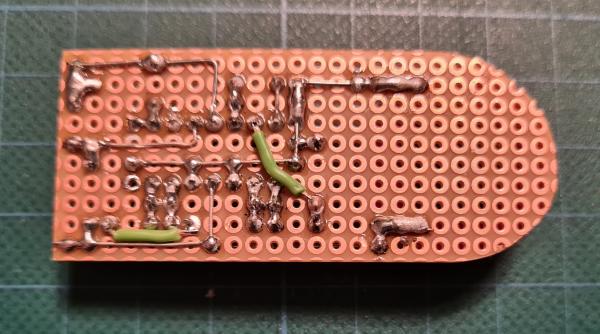
Wenn man die Bauteile geschickt platziert, kommt man mit sehr wenigen Drahtbrücken aus.
Ausschalter
Will man nicht mit Netzspannung spielen, dann reicht es aus, an den Ausgang der dritten Stufe eine helle LED mit Vorwiderstand anzuschließen. Ein solche Version werde ich auch noch bauen. Man kann die ganze Schaltung dann mit einer 9V-Batterie betrieben und bleibt komplett unabhängig vom Vertikutierer.Ich wollte aber lieber den Vertikutierer bei Kabelübertretung ausschalten.
Daher gibt es bei mir ein zusätzliches Gehäuse, das an einer Querstange des Vertikutierers angebracht wird. Es enthält ein 12V Netzteil für den Sensor, einen 230V Netzeingang und eine geschaltete Steckdose, in die der Vertikutierer eingesteckt wird.
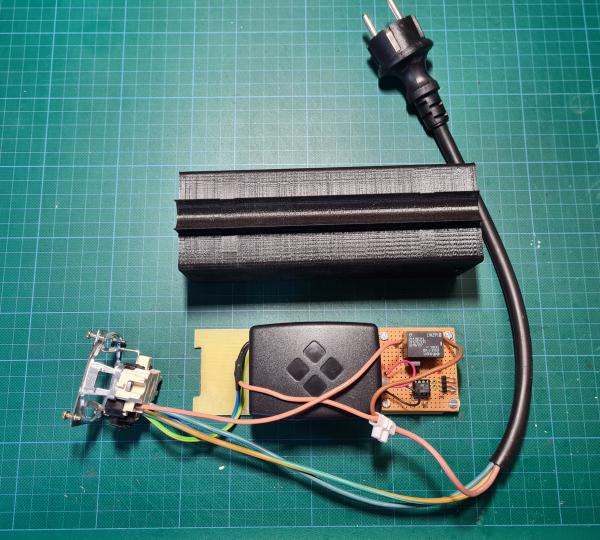
Es gibt zwei Anschlüsse für Sensoren, so das jeweils rechts und links am Verttkutierer einer angebracht werden kann.
Test mit Lampe
Sensor Innerhalb der Rasenkabelschleife:
Ein Sensor ist außerhalb:

So ergibt sich ein kompaktes System:

Hier provisorisch montiert:

Störungen und Schwachpunkte
#1 Unser Vertikutierer hat einen 1600W Motor, der selber ein Magnetfeld erzeugt. Je nachdem, wo man den Sensor abringt wird dieser vom Motor gestört. So konnte ich das system nicht sicher betreiben, wenn der Sensor an der linken Ecke in der Nähe des Motors angebracht war. Ich habe daher vorerst auf diesen Sensor verzichtet. Da man ja ungefähr weiß, wo das Kabel liegt, reicht auch ein Sensor an einer Ecke aus.
#2 Ich schalte den Motor mit einem Relais. Das ist zwar für 16A spezifiziert aber einen induktiven Verbraucher abschalten erzeugt einen Lichtbogen Und so muss ich mit einer sehr kurzen Lebensdauer meines Relais rechnen. Entweder wird die Kontaktoberfläche schlechter leitend oder das Relais klebt irgendwann fest.
Hier könnte die Abhilfe eine VDR sein, der parallel zu den Kontakten geschaltet ist, un so die Induktionspannung beim Abschalten limitiert oder ein Solid-State-Relais ohne mechanische Kontakte aber auch mit VDR.
Pinzipbedingte Limitation
Um auch Inseln im Rasen für den Mähroboter einzugrenzen, legt man zwei parallel Kabel in den Rasen als Verbindung zu der Insel. So löscht sich dort das Magnetfeld aus und der Roboter "sieht" keine Begrenzung.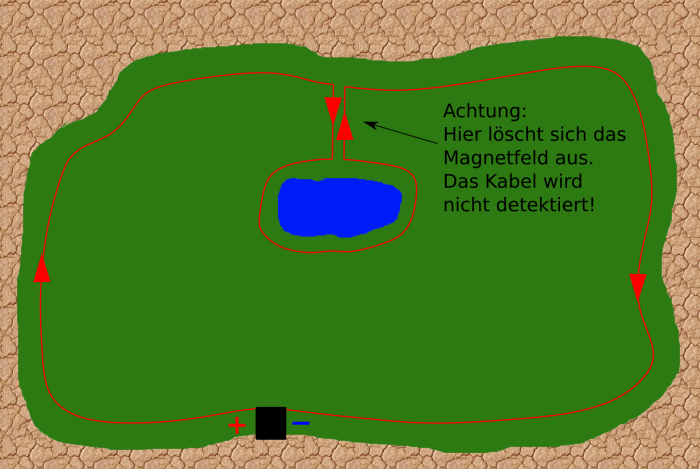
Dummerweise "sieht" unser Vertikutierer diese Kabel auch nicht und macht sich darüber her. Hier empfiehlt sich, die Kabel einfach so tief zu vergraben, dass der Messer des Vertikutierers es nicht mehr erreichen. Oder man merkt sich die Stelle und lässt sie aus.
Wichtige Hinweise zum Betrieb
Bei unserem Mähroboter schaltet sich das Rasenkabelsignal nur ein, wenn er nicht auf der Ladestation steht. Dazu muss man ihn nur herunternehmen. Fahren muss er nicht. Das kann bei anderen Systemen anders funktionieren.Es gibt keinen Standard für die Impulsbreite. Will man das System nachbauen, so wird man um ein wenig Experimentieren nicht herumkommen. Die Beschreibung hier kann also nur als Anregung dienen.
Es gibt Mähroboter, die ein Suchkabel haben, damit der Roboter die Ladestation findet. Dieses funktioniert nicht induktiv und wird daher auch nicht von dieser Schaltung gefunden.
 Wer sich nicht mit Netzspannung auskennt, sollte die LED-Version mit Batteriebetrieb bauen und die Finger von 230V lassen.
Wer sich nicht mit Netzspannung auskennt, sollte die LED-Version mit Batteriebetrieb bauen und die Finger von 230V lassen.Mehr dazu in Make 2/2022
https://shop.heise.de/make-02-2022/Print